May 18, 2026
I was recently reading Ted Chiang's Exhalation (book number 43 in 2026, but who's counting), and one story in particular has stayed with me: The Lifecycle of Software Objects. Chiang imagines digients, semi-sentient digital creatures who live in virtual worlds alongside humans, with personalities, habits, relationships, and histories of their own. The part that stuck wasn't their sentience. It was what happens when some of them get physical bodies.
They do not simply become embodied because someone hands them a shell. They have to learn it: weight, balance, resistance, distance, delay. The moment is not triumphant in the usual science fiction way. It is awkward. A mind that already exists suddenly has to become capable in a place it has never been before.
That is the part I keep returning to. A body is not just an output device. It changes what intelligence has to know. The digient doesn't need to become smarter in some abstract sense. It needs to become capable in a new medium. It has to discover what it means for intention to pass through motors, surfaces, balance, friction, and consequences.
Modern AI makes this old thought experiment feel less fictional. We are starting to build agents that know us across time. They can remember our preferences, manage messages, write code, summarize meetings, search files, schedule appointments, and act inside digital systems. At the same time, robotics companies are building machines that can see, move, grasp, navigate, and respond to the physical world. Those sound like the same project. I don't think they are.

Why This Matters Now
The timing is what makes the question interesting. Personal agents are becoming more persistent, more tool-capable, and more aware of the human context around a task. Robotics models are becoming more general, more language-driven, and more capable of acting in messy physical environments.
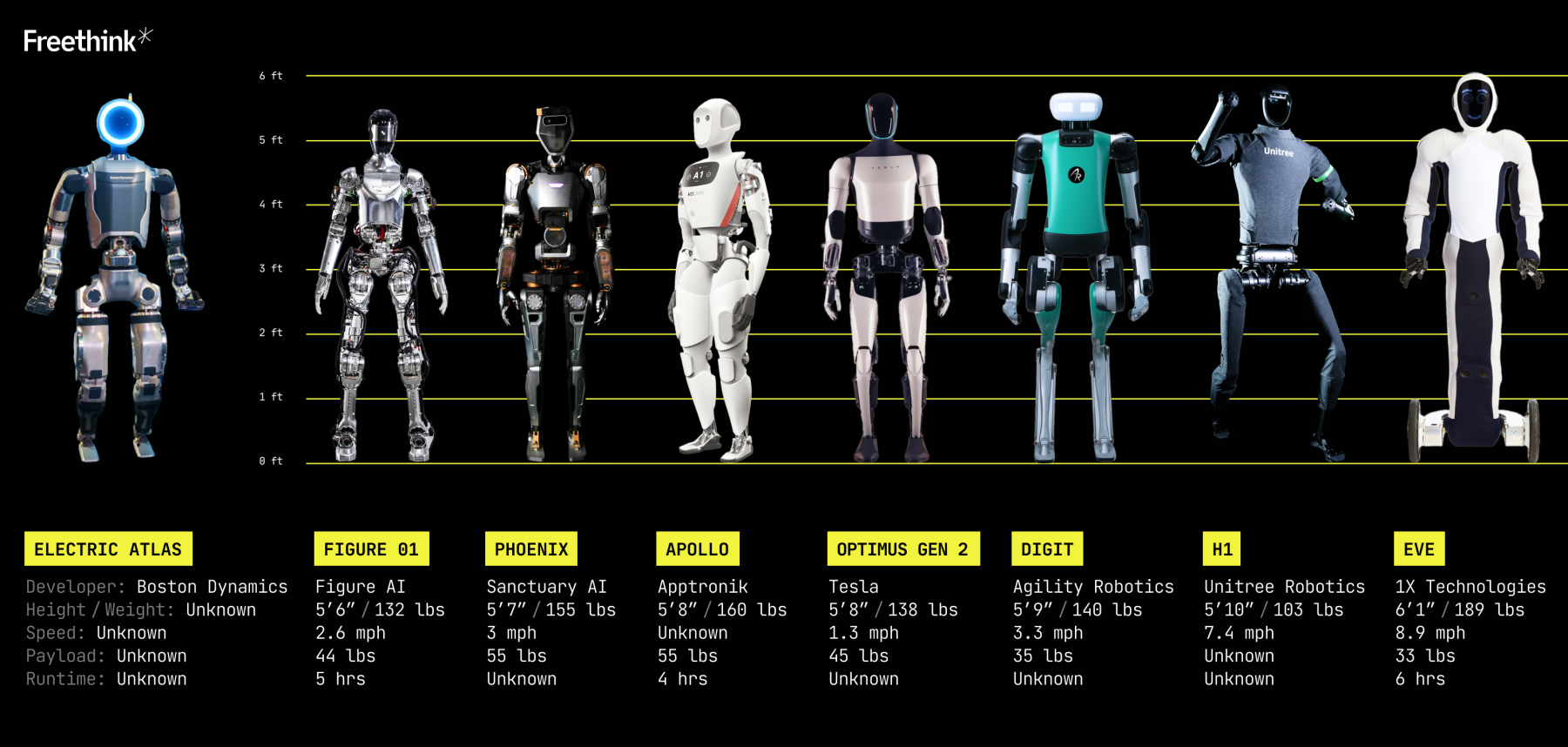
Image credit: Freethink.
The obvious story is that these two lines will merge: your agent will get a robot body, your robot will become your assistant, and the result will be one mind, one body, one product. I think that framing hides the harder problem. The AI that knows you and the robot that can move through the world are solving different problems: one learns identity, intent, memory, preference, and permission, while the other learns perception, control, manipulation, navigation, and safety. They meet at the moment of action, but they are not the same thing.
We Are Building Two Kinds Of Intelligence
Google DeepMind's Gemini Robotics 1.5 announcement is a useful snapshot of where embodied AI is heading. DeepMind describes a two-model robotics stack: Gemini Robotics-ER 1.5 acts as a high-level embodied reasoning model, while Gemini Robotics 1.5 turns visual information and instructions into robot motor commands (Google DeepMind, 2025). That is impressive work. It is also revealing. The robot side of intelligence is becoming more general, but it is still built from the body outward.
RT-2 showed how web-scale vision-language training could be connected to robot actions by treating actions as tokens inside a vision-language-action model (RT-2 paper, 2023). Open X-Embodiment pushed that idea across more machines, assembling data from 22 different robots and 527 skills to test whether policies could transfer across bodies (Open X-Embodiment, 2023).
Figure's Helix is another signal in the same direction. Figure describes Helix as a generalist vision-language-action model for humanoid control, able to coordinate two robots on a shared grocery task and use one set of neural network weights across picking, placing, drawer use, refrigerator use, and cross-robot interaction (Figure, 2025). This is exactly the evolution we should expect. Robots are getting better at turning perception into action. They are becoming less brittle, more general, and more capable of working across tasks.
Tesla may be the company to watch here, not because Optimus is already the finished version of this idea, but because Tesla owns both sides of the stack. If you think about it, Tesla vehicles are already a kind of robot, albeit one you can sit in. They have local processing power, perception, planning, decision-making, actuation, and a capability matrix constrained by the road. Grok then comes in as the human-facing layer: a conversational interface that can carry user preference, instruction, and context inside the vehicle experience (Tesla Support, 2026). That is more or less the pattern I think general-purpose robotics needs as well. Tesla describes Optimus as a general-purpose, bi-pedal autonomous humanoid for unsafe, repetitive, or boring tasks (Tesla AI & Robotics, 2026), but the hard step is not putting a chat agent near a robot. It is tandem processing: a Grok-like agent that understands intent and context working with an Optimus-like embodied system that understands motion, state, and physical risk.
But the question that keeps bothering me is not whether robots can use AI. The question is whether the AI that knows me can physically act on my behalf.
Put simply: the robot understands the task as a set of actions in the world, while the personal agent understands the task as an expression of a person.
The Gap Is A Safety Problem
This is where safety enters the story. Not as a compliance checklist added after the demo works, but as the architecture of the relationship between personal intent and physical action.
The Universal Robots piece on humanoid safety makes a useful point: form factor matters because physical design changes risk. A humanoid that falls near people creates a different safety problem than a fixed industrial arm or a purpose-built mobile platform. Stability, reliability, and standards are not side issues. They decide what kinds of deployment are responsible. I think the same is true at the intelligence layer.
If a personal agent can borrow a body, then safety is not only about torque limits, collision avoidance, or emergency stops. It is also about authority. Who granted the task? What context was shared? What did the robot actually need to know? What uncertainty should trigger a pause? What should be logged? What should be forgotten?
The more personal the task, the less safe it is to treat the robot as a generic endpoint for commands.
The First Framing
So this is the frame I want to hold: personal agents and robots are not one intelligence waiting to be combined. They are two specialized intelligences that need a way to coordinate. One knows the person. One knows the body. The hard part is the bridge.
That bridge cannot be a simple command channel. It has to carry capability, context, permission, uncertainty, refusal, and safety. It has to let the robot ask questions. It has to let the personal agent answer narrowly. It has to prevent "knows the person" from turning into "shares everything with the machine."
This is why I do not think the future is simply everyone buying one general-purpose humanoid and letting it learn their life from scratch. The more interesting future may be borrowed embodiment: personal agents temporarily coordinating with many purpose-built physical systems, each under scoped authority, each sharing only what the task requires.
Maybe the interesting question is not whether robots become intelligent. Maybe it is whether the AI that already knows us can safely borrow a body.
Source Notes
- Google DeepMind, "Gemini Robotics 1.5 brings AI agents into the physical world," September 25, 2025: https://deepmind.google/blog/gemini-robotics-15-brings-ai-agents-into-the-physical-world/
- Anthony Brohan et al., "RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control," arXiv, 2023: https://arxiv.org/abs/2307.15818
- Open X-Embodiment Collaboration, "Open X-Embodiment: Robotic Learning Datasets and RT-X Models," arXiv, 2023: https://arxiv.org/abs/2310.08864
- Figure AI, "Helix: A Vision-Language-Action Model for Generalist Humanoid Control," February 20, 2025: https://www.figure.ai/news/helix
- Tesla, "AI & Robotics": https://www.tesla.com/AI
- Tesla Support, "Grok": https://www.tesla.com/support/grok
- Universal Robots, "Beyond human imitation: Rethinking safety and purpose in robotics," January 13, 2026: https://www.universal-robots.com/blog/robotics-safety-purpose-beyond-human-imitation/